Literature Database Entry
li2021lstm
Kai Li, Wei Ni and Falko Dressler, "LSTM-characterized Deep Reinforcement Learning for Continuous Flight Control and Resource Allocation in UAV-assisted Sensor Network," IEEE Internet of Things Journal, August 2021. (online first)
Abstract
Unmanned aerial vehicles (UAVs) can be employed to collect sensory data in remote wireless sensor networks (WSN). Due to UAV’s maneuvering, scheduling a sensor device to transmit data can overflow data buffers of the unscheduled ground devices. Moreover, lossy airborne channels can result in packet reception errors at the scheduled sensor. This paper proposes a new deep reinforcement learning based flight resource allocation framework (DeFRA) to minimize the overall data packet loss in a continuous action space. DeFRA is based on Deep Deterministic Policy Gradient (DDPG), optimally controls instantaneous headings and speeds of the UAV, and selects the ground device for data collection. Furthermore, a state characterization layer, leveraging long short-term memory (LSTM), is developed to predict network dynamics, resulting from time-varying airborne channels and energy arrivals at the ground devices. To validate the effectiveness of DeFRA, experimental data collected from a real-world UAV testbed and energy harvesting WSN are utilized to train the actions of the UAV. Numerical results demonstrate that the proposed DeFRA achieves a fast convergence while reducing the packet loss by over 14%, as compared to existing deep reinforcement learning solutions.
Quick access
Original Version ![]() (at publishers web site)
(at publishers web site)
BibTeX ![]()
Contact
Kai Li
Wei Ni
Falko Dressler
BibTeX reference
@article{li2021lstm,
author = {Li, Kai and Ni, Wei and Dressler, Falko},
doi = {10.1109/JIOT.2021.3102831},
note = {to appear},
title = {{LSTM-characterized Deep Reinforcement Learning for Continuous Flight Control and Resource Allocation in UAV-assisted Sensor Network}},
journal = {IEEE Internet of Things Journal},
issn = {2327-4662},
publisher = {IEEE},
month = {8},
year = {2021},
}
Copyright notice
Links to final or draft versions of papers are presented here to ensure timely dissemination of scholarly and technical work. Copyright and all rights therein are retained by authors or by other copyright holders. All persons copying this information are expected to adhere to the terms and constraints invoked by each author's copyright. In most cases, these works may not be reposted or distributed for commercial purposes without the explicit permission of the copyright holder.
The following applies to all papers listed above that have IEEE copyrights: Personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution to servers or lists, or to reuse any copyrighted component of this work in other works must be obtained from the IEEE.
The following applies to all papers listed above that are in submission to IEEE conference/workshop proceedings or journals: This work has been submitted to the IEEE for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible.
The following applies to all papers listed above that have ACM copyrights: ACM COPYRIGHT NOTICE. Permission to make digital or hard copies of part or all of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. Copyrights for components of this work owned by others than ACM must be honored. Abstracting with credit is permitted. To copy otherwise, to republish, to post on servers, or to redistribute to lists, requires prior specific permission and/or a fee. Request permissions from Publications Dept., ACM, Inc., fax +1 (212) 869-0481, or permissions@acm.org.
The following applies to all SpringerLink papers listed above that have Springer Science+Business Media copyrights: The original publication is available at www.springerlink.com.
This page was automatically generated using BibDB and bib2web.
Featured Paper
- Where to Decide? Centralized vs. Distributed Vehicle Assignment for Platoon Formation
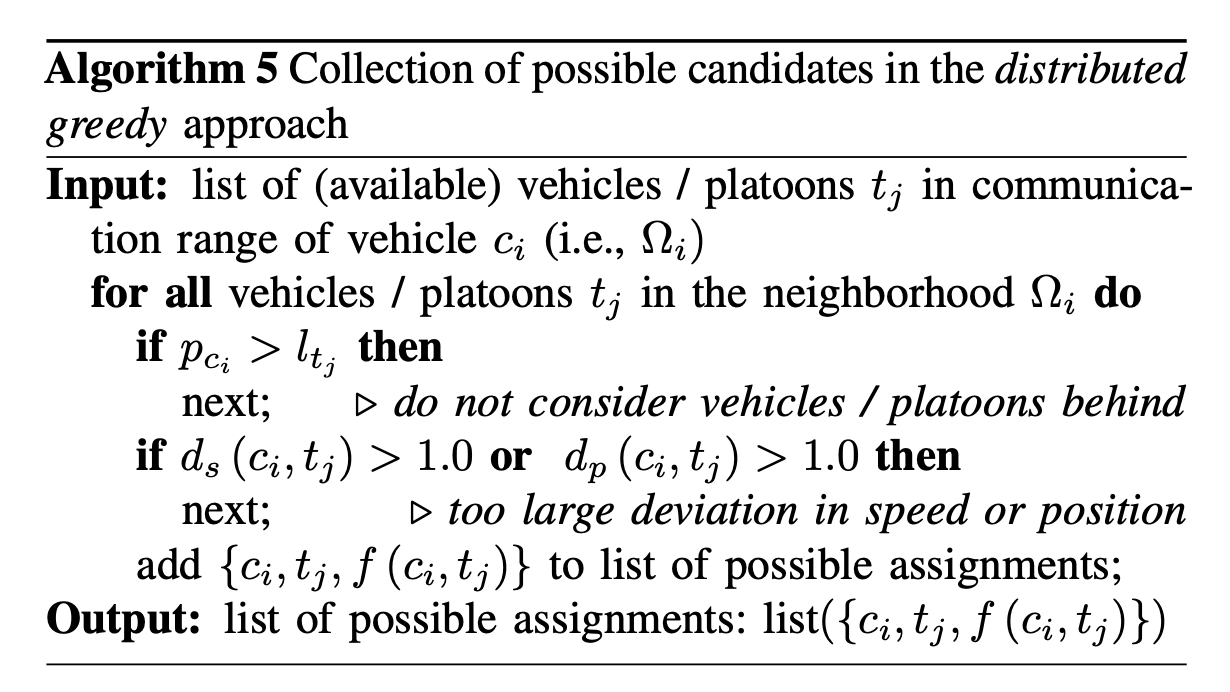
Optimized platoon formation is crucial for achieving best performance in terms of travel time and energy consumption. We explore the computation of vehicle-to-platoon ...
News
- July 12, 2024
Tutorial Session at IEEE MeditCom 2024
Jorge Torres Gómez gave a tutorial titled "Age of Informa... - July 08, 2024
New IEEE Transactions on Intelligent Transportation Systems article
Our article Where to Decide? Centralized vs. Distributed ... - July 02, 2024
Contributions to Berlin 6G Conference
The Telecommunication Networks Group (TKN) team has been ... - July 01, 2024
New Elsevier Computer Communications article
Our article Using Ranging for Collision-Immune IEEE 802.1... - June 27, 2024
New IEEE Transactions on Molecular, Biological and Multi-Scale Communications article
Our article Age of Information-based Abnormality Detectio...