Personal website of
Prof. Dr.-Ing. habil. Falko Dressler
Self-organization of SN-MRS systems
Institutions
- Computer Networks and Communication Systems, University of Erlangen
Team
- Dr. Falko Dressler (coordination)
- Thomas Halva Labella
Funding
- DAAD grant "Self-organization of SN-MRS systems" (331 4 03 003)
Project Time
- 01.11.2005 - 30.04.2006
Description
 The research objectives can be summarised by the following statement:
the study of bio-inspired task allocation algorithms for SN-MRS systems with high number of units, and with particular attention to scalability, real-time constraints, reliability of the transmitted data, success of robot operations and network task-aware self-organisation.
The research objectives can be summarised by the following statement:
the study of bio-inspired task allocation algorithms for SN-MRS systems with high number of units, and with particular attention to scalability, real-time constraints, reliability of the transmitted data, success of robot operations and network task-aware self-organisation.
Recently, a few projects have studied the integration of SNs and MRSs. The approaches in the literature follow usually two ways. In the first one, sensors are treated as "helpers" for the robots. They are for instance landmarks that robots follow to navigate in dificult environments. In the second approach, the robots help the sensor network, for instance by replacing out-of-work pieces or, since they have room for bigger batteries and they can afford more powerful transmission, they work as gateways for long distance communication. In both cases, the interactions between robots and network are outbalanced either toward SN or toward MRS. The former approach ("sensors help robots") seems to be followed mainly by researchers with a strong background in robotics and Artificial Intelligence, the latter ("robots help sensors") by researchers coming from the telecommunication field.
 Seen from a high abstraction level, the main objective of this proposal is to change the approach to SN-MRS systems. We do no want to treat them as the sum of two systems, but only as one heterogeneous system, where the difference between static and mobile units becomes fuzzier. To design and program such systems, it is required a good knowledge of both telecommunication networks and robotics. Both approaches have their advantages and disadvantages, but we believe that pushing the integration further will reveal new possible applications and interesting solutions for SN-MRS systems.
Seen from a high abstraction level, the main objective of this proposal is to change the approach to SN-MRS systems. We do no want to treat them as the sum of two systems, but only as one heterogeneous system, where the difference between static and mobile units becomes fuzzier. To design and program such systems, it is required a good knowledge of both telecommunication networks and robotics. Both approaches have their advantages and disadvantages, but we believe that pushing the integration further will reveal new possible applications and interesting solutions for SN-MRS systems.
The following research aspects affect our developments:
- number of units
- time constraints
- task allocation
- network-robot interactions
Selected Publications
 Thomas Halva Labella and Falko Dressler, "A Bio-Inspired Architecture for Division of Labour in SANETs," in Advances in Biologically Inspired Information Systems - Models, Methods, and Tools, Studies in Computational Intelligence (SCI), vol. 69, Falko Dressler and Iacopo Carreras (Eds.), Springer, 2007, pp. 209–228.
[DOI, BibTeX, PDF, More details]
Thomas Halva Labella and Falko Dressler, "A Bio-Inspired Architecture for Division of Labour in SANETs," in Advances in Biologically Inspired Information Systems - Models, Methods, and Tools, Studies in Computational Intelligence (SCI), vol. 69, Falko Dressler and Iacopo Carreras (Eds.), Springer, 2007, pp. 209–228.
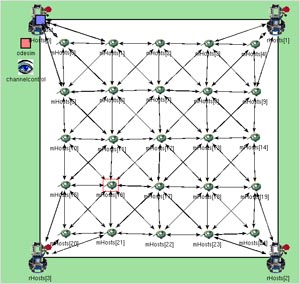
[DOI, BibTeX, PDF, More details] Thomas Halva Labella, Isabel Dietrich and Falko Dressler, "BARAKA: A Hybrid Simulator of SANETs," Proceedings of 2nd IEEE/ACM International Conference on Communiation Systems Software and Middleware (COMSWARE 2007), Bengaluru, India, January 2007.
[DOI, BibTeX, PDF, More details]
Thomas Halva Labella, Isabel Dietrich and Falko Dressler, "BARAKA: A Hybrid Simulator of SANETs," Proceedings of 2nd IEEE/ACM International Conference on Communiation Systems Software and Middleware (COMSWARE 2007), Bengaluru, India, January 2007.
[DOI, BibTeX, PDF, More details]- Thomas Halva Labella and Falko Dressler, "A Bio-Inspired Architecture for Division of Labour in SANETs," Proceedings of 1st IEEE/ACM International Conference on Bio-Inspired Models of Network, Information and Computing Systems (BIONETICS 2006), Cavalese, Italy, December 2006.
[DOI, BibTeX, PDF, More details]
- Thomas Halva Labella, Gerhard Fuchs and Falko Dressler, "A Simulation Model for Self-organised Management of Sensor/Actuator Networks," Proceedings of GI/ITG KuVS Fachgespräch Selbstorganisierende, Adaptive, Kontextsensitive verteilte Systeme (SAKS), Kassel, Germany, March 2006. [BibTeX, PDF, More details]
Prof. Dr.-Ing. habil. Falko Dressler

TKN is co-organizing
Featured Paper
- Distributed Age-of-Information Scheduling with NOMA via Deep Reinforcement Learning
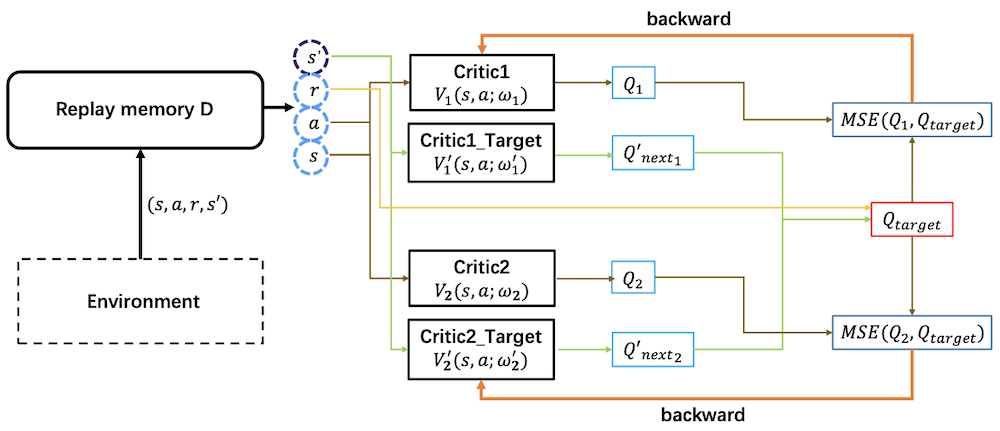
Many emerging applications in edge computing require processing of huge volumes of data generated by end devices, using the freshest available information. In this pap...
News
- November 13, 2024
New staff member: Peter Scheepers
We welcome to Peter Scheepers who joined our group in Nov... - November 07, 2024
New IEEE Transactions on Nanotechnology article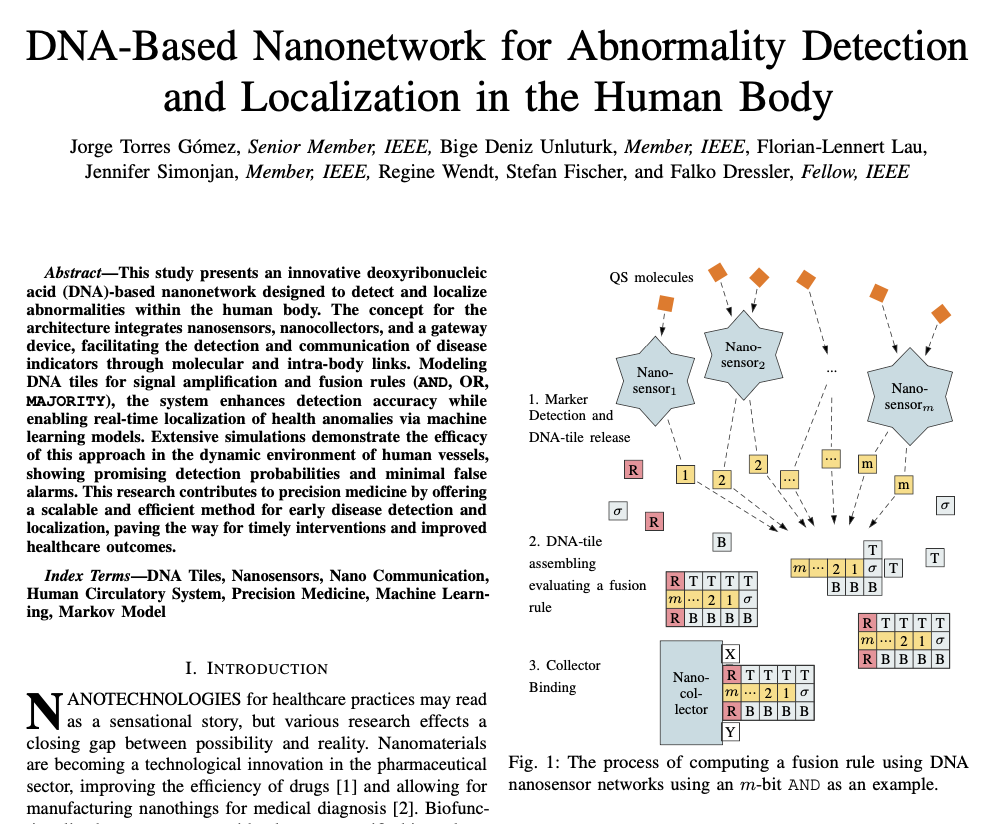
Our article DNA-Based Nanonetwork for Abnormality Detecti... - November 01, 2024
New IEEE Transactions on Mobile Computing article
Our article Biasing Federated Learning with A New Adversa... - October 29, 2024
Paper Presentation at ACM Nanocom 2024
Mobility matters in the nanoscale to implement the connec... - October 29, 2024
Paper Presentation at ACM NanoCom 2024
Delving into simulators for the Internet of Bio-Nano-Thin...